# ArrayWUnits and ArrayWFrame#
Last revised 2026
This tutorial introduces the two core data containers that flow through every Scarabaeus workflow:
ArrayWUnits: Numerical array + physical units (km, km/s, …)ArrayWFrame: Numerical array + units + reference frame (J2000, ITRF93, …)
Contents
Dimensions and Units —
Units,DimensionsArrayWUnits— construction, arithmetic, conversion, safety checksFrames —
Frame.generate_common_frames, DCM, full transformationArrayWFrame— construction, frame conversion, frame-aware arithmetic
0. Imports and Setup#
[1]:
import scarabaeus as scb
import supplementary as supp
import numpy as np
# load tutorial data
data = supp.load_data()
# load kernels
scb.SpiceManager.clear_kernels()
scb.SpiceManager.load_kernel_from_mkfile(data.mk.path)
SCB supplementary data up to date.
1. Dimensions and Units#
Scarabaeus tracks physical dimensions through every arithmetic operation. Units.get_units() returns unit objects that carry both scale and dimension.
[2]:
km, m, sec, day, rad, deg, kg = scb.Units.get_units(
['km', 'm', 'sec', 'day', 'rad', 'deg', 'kg'])
print(f"km : {km} dimensions → {km.dimensions}")
print(f"m : {m} dimensions → {m.dimensions}")
print(f"sec : {sec} dimensions → {sec.dimensions}")
print(f"deg : {deg} dimensions → {deg.dimensions}")
print(f"kg : {kg} dimensions → {kg.dimensions}")
km : km dimensions → Length
m : m dimensions → Length
sec : sec dimensions → Time
deg : deg dimensions → Angle
kg : kg dimensions → Mass
[3]:
# Unit arithmetic propagates dimensions automatically
vel_unit = km / sec
acc_unit = km / sec**2
area_unit = km**2
freq_unit = sec**-1
print(f"km/sec : {vel_unit} → {vel_unit.dimensions}")
print(f"km/sec² : {acc_unit} → {acc_unit.dimensions}")
print(f"km² : {area_unit} → {area_unit.dimensions}")
print(f"sec⁻¹ : {freq_unit} → {freq_unit.dimensions}")
print(f"km * kg : {km * kg} → {(km * kg).dimensions}")
km/sec : km/sec → Velocity
km/sec² : km/sec^2 → Acceleration
km² : km^2 → Area
sec⁻¹ : Hz → per Time
km * kg : kg*km → Mass times Length
2. ArrayWUnits#
ArrayWUnits wraps a NumPy array together with its physical units. The units travel with the array through every mathematical operation.
[4]:
# ── Scalars ──────────────────────────────────────────────────────
altitude = scb.ArrayWUnits(408.0, km) # ISS altitude
period = scb.ArrayWUnits(5552.0, sec) # ISS orbital period
dry_mass = scb.ArrayWUnits(419725.0, kg) # ISS mass
print(f"Altitude : {altitude}")
print(f"Period : {period}")
print(f"Mass : {dry_mass}")
print(f"altitude.values : {altitude.values} (raw float)")
print(f"altitude.units : {altitude.units}")
Altitude : 408.0 km
Period : 5552.0 sec
Mass : 419725.0 kg
altitude.values : 408.0 (raw float)
altitude.units : km
[5]:
# ── Homogeneous vector (all elements share one unit) ─────────────
pos = scb.ArrayWUnits(np.array([7000.0, -1200.0, 3500.0]), km)
vel = scb.ArrayWUnits(np.array([-1.2, 6.8, 3.1 ]), km/sec)
print("Position [km] :", pos)
print("Velocity [km/s]:", vel)
print("pos.values :", pos.values)
print("pos.shape :", pos.shape)
print()
# ── Heterogeneous state vector (pos + vel, mixed units per element) ─
state = scb.ArrayWUnits(
np.array([7000.0, -1200.0, 3500.0, -1.2, 6.8, 3.1]),
[km, km, km, km/sec, km/sec, km/sec],
)
print("State vector (mixed units):")
print(f" values : {state.values}")
print(f" units : {state.units}")
Position [km] : [ 7000. -1200. 3500.] [km ... km]
Velocity [km/s]: [-1.2 6.8 3.1] [km/sec ... km/sec]
pos.values : [ 7000. -1200. 3500.]
pos.shape : (3,)
State vector (mixed units):
values : [ 7.0e+03 -1.2e+03 3.5e+03 -1.2e+00 6.8e+00 3.1e+00]
units : [km km km km/sec km/sec km/sec]
[6]:
# ── Arithmetic — units propagate automatically ────────────────────
pos1 = scb.ArrayWUnits(np.array([1000.0, 2000.0, 3000.0]), km)
pos2 = scb.ArrayWUnits(np.array([ 500.0, 800.0, 1200.0]), km)
dt = scb.ArrayWUnits(60.0, sec)
mass = scb.ArrayWUnits(500.0, kg)
print(f"pos1 * 2 = {pos1 * 2}")
print(f"pos1 \ dt = {pos1 / dt}") # km/sec
print(f"(pos1/dt)**2 = {(pos1/dt)**2}") # km²/sec²
print(f"mass * 9.8 = {mass * 9.8}")
# ── Safety: same dimensions required for + / - ───────────────────
print()
print("Adding km + km/sec (should raise TypeError):")
try:
_ = pos1 + vel
except (ValueError, TypeError) as e:
print(f" Blocked: {type(e).__name__}")
pos1 * 2 = [2000. 4000. 6000.] [km ... km]
pos1 \ dt = [16.66666667 33.33333333 50. ] [km/sec ... km/sec]
(pos1/dt)**2 = [ 277.77777778 1111.11111111 2500. ] [km^2/sec^2 ... km^2/sec^2]
mass * 9.8 = 4900.0 kg
Adding km + km/sec (should raise TypeError):
Blocked: ValueError
[7]:
# ── Unit conversion ──────────────────────────────────────────────
dist_km = scb.ArrayWUnits(384400.0, km) # Moon distance
dist_m = dist_km.convert_to(m) # → metres
dist_day_km = scb.ArrayWUnits(86400.0, sec).convert_to(day) # 1 day in days
print(f"\nUnit conversion:")
print(f"{dist_km} → {dist_m}")
print(f"86400 sec → {dist_day_km}")
Unit conversion:
384400.0 km → 384400000.0 m
86400 sec → 1.0 day
3. Frames#
A Frame object holds the SPICE frame name and ID. Frame.generate_common_frames() returns four frames used throughout Scarabaeus.
[8]:
J2000, ITRF93, ECLIPJ2000, IAUEARTH = scb.Frame.generate_common_frames()
for fr in [J2000, ITRF93, ECLIPJ2000, IAUEARTH]:
print(fr)
J2000 (0 - SOLAR SYSTEM BARYCENTER)
ITRF93 (399 - EARTH)
ECLIPJ2000 (0 - SOLAR SYSTEM BARYCENTER)
IAU_EARTH (399 - EARTH)
[9]:
J2000.disp_properties()
========================================
Frame Properties
========================================
Frame Name: J2000
Frame ID: 1
Origin Name: SOLAR SYSTEM BARYCENTER
Origin ID: 0
Frame Class: 1
Class ID: 1
========================================
4. Frame Transformations#
Frame.get_DCM returns the 3×3 Direction Cosine Matrix (rotation only). Frame.get_transformation returns the 6×6 state-transformation matrix (rotation + rate).
[10]:
# ── Define an epoch ──────────────────────────────────────────────
et0 = scb.SpiceManager.jd2et(2461809.72995654) # arbitrary JD
epoch = scb.EpochArray(np.array([et0]), sys='TDB')
# ── Direction Cosine Matrix: J2000 → IAUEARTH ────────────────────
# get_DCM returns a plain numpy ndarray (shape 3×3)
R = scb.Frame.get_DCM(source_frame=J2000, target_frame=IAUEARTH, epoch=epoch)
print(f"DCM shape : {R.shape}")
print(f"DCM (J2000→IAUEARTH):\n{np.round(R, 6)}")
# ── Verify it is orthogonal: R @ Rᵀ ≈ I ─────────────────────────
RRT = R @ R.T
print(f"\n||R @ Rᵀ − I||₂ = {np.linalg.norm(RRT - np.eye(3)):.2e} (should be ~0)")
DCM shape : (3, 3)
DCM (J2000→IAUEARTH):
[[-7.63801e-01 -6.45449e-01 2.08100e-03]
[ 6.45446e-01 -7.63803e-01 -1.77000e-03]
[ 2.73200e-03 -9.00000e-06 9.99996e-01]]
||R @ Rᵀ − I||₂ = 2.71e-16 (should be ~0)
[11]:
# ── Full state-transformation matrix (4×4 homogeneous) ───────────
# get_transformation returns a list; each element is an ArrayWUnits
T_list = scb.Frame.get_transformation(
source_frame=J2000, target_frame=IAUEARTH, epoch=epoch)
T_mat = np.array(T_list[0].values) # (4, 4) numpy array
print(f"Transformation matrix shape : {T_mat.shape}")
print(f"Upper-left 3×3 (rotation):\n{np.round(T_mat[:3, :3], 6)}")
print(f"Translation column (km) : {np.round(T_mat[:3, 3], 3)}")
Transformation matrix shape : (4, 4)
Upper-left 3×3 (rotation):
[[-7.63801e-01 -6.45449e-01 2.08100e-03]
[ 6.45446e-01 -7.63803e-01 -1.77000e-03]
[ 2.73200e-03 -9.00000e-06 9.99996e-01]]
Translation column (km) : [ 2.69516128e+07 -1.39474250e+08 3.83428136e+07]
5. ArrayWFrame#
ArrayWFrame adds a reference frame to an ArrayWUnits so that frame-incompatible operations are caught at runtime.
[12]:
# ── Constructor form 1: ArrayWUnits + Frame ──────────────────────
pos_awu = scb.ArrayWUnits(np.array([7000.0, -1200.0, 3500.0]), km)
pos_j2k = scb.ArrayWFrame(pos_awu, J2000)
print("Form 1 (ArrayWUnits + Frame):")
print(f" values : {pos_j2k.quantity.values}")
print(f" units : {pos_j2k.quantity.units}")
print(f" frame : {pos_j2k.frame}")
print()
# ── Constructor form 2: ndarray + Units + Frame ───────────────────
pos_j2k2 = scb.ArrayWFrame(np.array([7000.0, -1200.0, 3500.0]), km, J2000)
print("Form 2 (array + units + frame):")
print(f" values : {pos_j2k2.quantity.values}")
print(f" frame : {pos_j2k2.frame}")
Form 1 (ArrayWUnits + Frame):
values : [ 7000. -1200. 3500.]
units : km
frame : J2000 (0 - SOLAR SYSTEM BARYCENTER)
Form 2 (array + units + frame):
values : [ 7000. -1200. 3500.]
frame : J2000 (0 - SOLAR SYSTEM BARYCENTER)
[13]:
# ── Frame conversion: J2000 → IAUEARTH at a single epoch ─────────
# convert_to operates IN-PLACE and returns None — save original first
pos_j2k = scb.ArrayWFrame(np.array([7000.0, -1200.0, 3500.0]), km, J2000)
orig_vals = np.array(pos_j2k.quantity.values) # snapshot before conversion
pos_j2k.convert_to(IAUEARTH, epoch) # in-place: frame updated
earth_vals = np.array(pos_j2k.quantity.values)
print("\nFrame conversion (J2000 → IAUEARTH):")
print(f"J2000 (before) : {np.round(orig_vals, 3)} km")
print(f"IAUEARTH (after) : {np.round(earth_vals, 3)} km")
print(f"|r| J2000 = {np.linalg.norm(orig_vals):.4f} km")
print(f"|r| IAUEARTH = {np.linalg.norm(earth_vals):.4f} km (must be equal)")
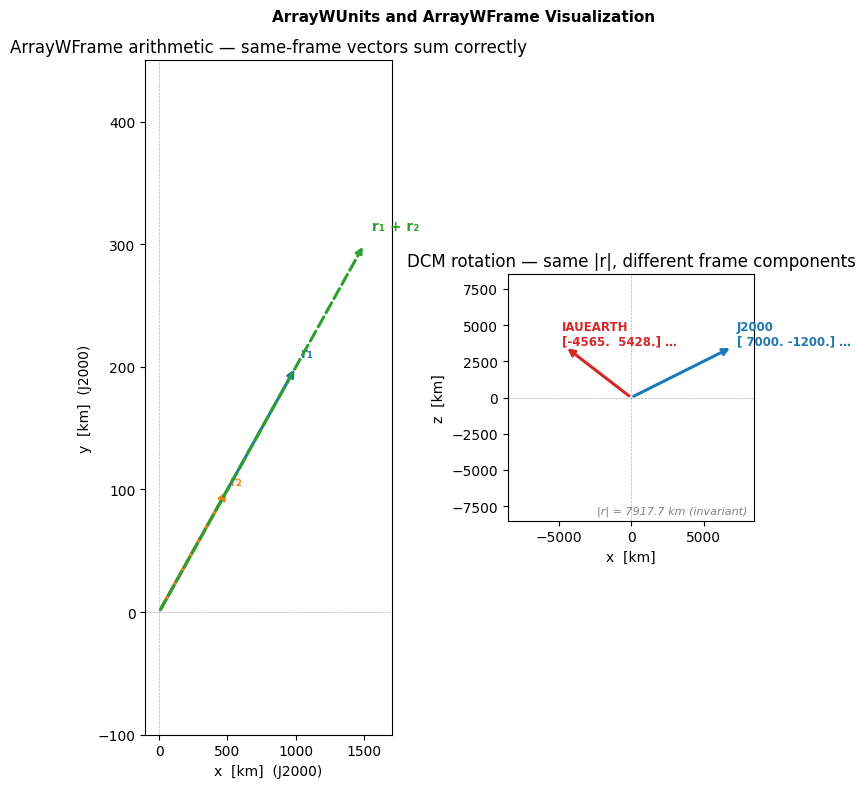
Frame conversion (J2000 → IAUEARTH):
J2000 (before) : [ 7000. -1200. 3500.] km
IAUEARTH (after) : [-4564.782 5428.494 3519.122] km
|r| J2000 = 7917.7017 km
|r| IAUEARTH = 7917.7017 km (must be equal)
[14]:
# ── Same-frame arithmetic ─────────────────────────────────────────
r1 = scb.ArrayWFrame(np.array([1000.0, 200.0, 300.0]), km, J2000)
r2 = scb.ArrayWFrame(np.array([ 500.0, 100.0, 150.0]), km, J2000)
print("Same-frame addition (J2000 + J2000):")
print(f" {r1.quantity.values} + {r2.quantity.values}")
print(f" = {(r1 + r2).quantity.values} km ✓")
print()
# ── Cross-frame arithmetic is blocked ────────────────────────────
r_itrf = scb.ArrayWFrame(np.array([4.0, 5.0, 6.0]), km, ITRF93)
print("Cross-frame addition (J2000 + ITRF93) — should be blocked:")
try:
_ = r1 + r_itrf
print(" FAIL — should have raised an error")
except Exception as e:
print(f" Blocked ✓ ({type(e).__name__})")
print()
# ── Cross-unit arithmetic is blocked ─────────────────────────────
vel_j2k = scb.ArrayWFrame(np.array([1.0, 2.0, 3.0]), km/sec, J2000)
print("Cross-unit addition (km + km/s in J2000) — should be blocked:")
try:
_ = r1 + vel_j2k
print(" FAIL — should have raised an error")
except Exception as e:
print(f" Blocked ✓ ({type(e).__name__})")
Same-frame addition (J2000 + J2000):
[1000. 200. 300.] + [500. 100. 150.]
= [1500. 300. 450.] km ✓
Cross-frame addition (J2000 + ITRF93) — should be blocked:
Blocked ✓ (ValueError)
Cross-unit addition (km + km/s in J2000) — should be blocked:
Blocked ✓ (ValueError)
Summary#
Concept |
Class |
Key methods |
|---|---|---|
Physical units |
|
|
Array + units |
|
|
Coordinate frame |
|
|
Array + units + frame |
|
|
Key safety guarantees
ArrayWUnitsblocks addition/subtraction between incompatible dimensions (km + km/s raisesValueError)ArrayWFrameblocks arithmetic between different frames (J2000 + ITRF93 raises an exception)Frame conversions require an epoch because the rotation matrix is time-varying
These guarantees propagate through all Scarabaeus dynamics, filter, and measurement modules.
[15]:
supp.supp_plotting.plot_awu_awf_visuals(R)